Follow LVIS
External Links
- 61A: Geodesy and Geophysics Laboratory
- Operation IceBridge
- ABoVE
- NSIDC
- GEDI
- GRACE
- University of Maryland
Recent News
LVIS featured on #ScienceInSeconds
28 Jul 2021
Dr. Michelle Hofton was interviewed for NASA Associate Administrator Dr. Thomas Zurbuchen's Twitter update during the 2021 GEDI Calibration/Validation campaign!
Greenland data available at NSIDC
14 Jun 2018
LVIS Level 1B and 2 data products from Operation IceBridge Greenland 2017 are now available at NSIDC. Links are now available here!
ABoVE data available at NSIDC
9 May 2018
LVIS Level 1B and 2 data products from ABoVE 2017 are now available at NSIDC, and the IceBridge 2017 data products have been sent out. Take a look here!
ABoVE data sent to NSIDC
8 Mar 2018
LVIS data from ABoVE 2017 has been sent to NSIDC. As soon as the data is available, links will be posted here!
-
Measurement Capabilities and Expected Performance of the DESDynI Multi-beam Lidar
Blair, J. B.; Hofton, M. A. AGU December 2008
The DESDynI mission consists of a Full-waveform Multi-beam Lidar and a Synthetic Aperture Radar for measuring Surface Deformation, Vegetation Structure, and Ice Sheets. Although the primary purpose of the Multi-beam Lidar is ecosystem structure, this Lidar system will also make significant contributions to a variety of other science applications. The current baseline design for the DESDynI Lidar has 5 beams each operating at a repetition rate of 240 Hz. After 5 years of operations, the Lidar will produce approximately 20- 30 Billion land and ice surface measurements with an extraordinary number of track crossings that can be used to directly assess surface change. Analysis of the performance of the Laser Vegetation Imaging Sensor (LVIS) that utilizes a similar laser pulsewidth and footprint diameter (i.e., 20-25 m) has shown 3 cm range precision for altimetric purposes. Coupling this precise ranging capability with a highly accurate attitude determination system and position determination system results in sub-decimeter accuracy measurements of land and ice surface topography. The results of numerical simulations and LVIS data analysis will be used to estimate the expected performance of the DESDynI Lidar in space. Performance under a variety of surface slope, reflectivity, and roughness conditions will be assessed. -
Forest Vertical Structure from Discrete Lidar, LVIS, and the Ideal Tree Distribution Model
Bradley, E.; Roberts, D. R. K. P. G. AGU December 2008
Forest height and structure are important variables in the consideration of the global carbon cycle and biodiversity. Both discrete return and large footprint waveform lidar instruments can provide three dimensional information, with discrete return lidar providing higher spatial resolution in the horizontal plane and waveform lidar resulting in more detailed vertical information but for a larger area. Both systems have been used to quantify forest characteristics, however, due to the limited waveform data available, few studies have directly compared these systems. This research seeks to address this deficiency by utilizing NASA's 2003 Laser Vegetation Imaging Sensor (LVIS) waveform data acquired over the Smithsonian Environmental Research Center forest, Maryland, USA, in combination with multi-return discrete lidar and stem plot data. To compare the two systems, linear regressions of height-based lidar metrics were made and quantitative measures of waveform agreement were calculated following the generation of synthetic waveforms from the discrete return data. The LVIS 100% waveform energy height showed a strong agreement with the discrete return maximum canopy height (r2=0.88) and the average cross-waveform correlation was 0.86. For validation, the lidar canopy height model was compared to stem height estimates and digital canopy models generated from diameter data. Using the Purves et al. Ideal Tree Distribution model was superior to site- specific, general-species allometric equations in terms of agreement with the lidar-derived height. -
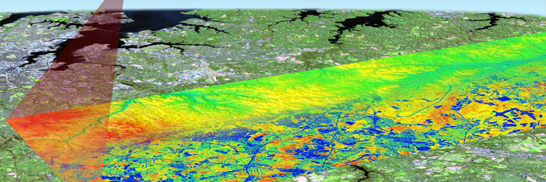
Generating Precise and Accurate Waveform-Derived Products From Medium-Footprint Geodetic Imaging Lidar
Hofton, M. A.; Blair, J. B. R. D. L. AGU December 2008
NASA's airborne Laser Vegetation Imaging Sensor (LVIS) is a medium-high altitude (10 km above the ground), medium-footprint (10-25 m wide) wide-swath (2 km) geodetic, imaging laser altimeter system that digitally records the shapes of both the outgoing and returning laser pulses (waveforms) for every shot. Since 1997, the system has been used to acquire data in various locations including California, Arkansas, Costa Rica, New England, Maryland, Virginia and Greenland. It has also been used to prototype future spaceborne measurements (e.g., VCL, DESDynI), develop and refine data and return waveform processing algorithms, and showcase science applications of full-waveform altimetry. Data geolocation is achieved using NASA's Variable Estimation, Geolocation and Analysis Software (VEGAS). Using this software, we solve for and apply various system biases and parameters (e.g., angular offsets between the various reference frames on the aircraft and the timing offsets between the various data inputs) to generate the position of the laser footprint on the ground relative to a global reference frame such as WGS84. Waveforms are interpreted to identify the locations of different surfaces within the footprint including the mean ground, canopy top, and several metrics related to surface (including canopy) structure. For each data set, the precision and accuracy of the data products are assessed by intercomparison, and comparison to available in-situ data such as collected using GPS or higher-resolution laser altimetry. We will review the latest data processing procedures employed in the VEGAS system and the LVIS waveform interpretation approaches. The precision and accuracy of the data products from various locations will also be presented. Implications for future spaceborne missions recommended by the National Research Council (NRC) such as DESDynI, ICESat II and LIST will be discussed. -
Estimation of Tropical Forest Leaf Area Index Using Medium-Footprint Lidar
Sheldon, S. L.; Dubayah, R. O. C. D. B. H. M. A. B. J. B. AGU December 2008
As an important descriptor of forest canopy structure and productivity, leaf surface area strongly relates to respiration, photosynthesis, canopy dynamics, and other biophysical processes. Leaf Area Index (LAI), the amount of one sided leaf area per unit of ground area, has been an important parameter in a variety of ecosystem models. We explore the use of medium-footprint airborne scanning lidar to estimate the spatial distribution of LAI at a landscape scale. Direct estimates of LAI were collected on vertical transects at 71 sites stratified across a tropical wet forest landscape at La Selva Biological Station in Costa Rica. Vertical canopy structure information was collected by the Laser Vegetation Imaging Sensor (LVIS) over La Selva in March of 2005. We analyze the relationship between field-derived LAI estimates and three-dimensional lidar-derived canopy structure information, specifically waveforms and waveform-derived metrics. We also assess the potential of lidar data to scale local estimates of LAI to the landscape level. -
Mapping Potential Ivory Billed Woodpecker Habitat using Lidar and Hyperspectral Data Fusion
Swatantran, A.; Dubayah, R. H. M. B. J. B. H. L. AGU December 2008
Multisensor fusion is a powerful approach towards characterizing forest structure for effective management of wildlife habitats. The rediscovery of the Ivory Billed Woodpecker in 2005 reinforced the need to map and conserve suitable habitat for the previously thought extinct bird. In this study we fused waveform lidar and hyperspectral data to map potential habitat for the woodpecker along the Lower Mississippi Valley of Arkansas. Laser Vegetation Imaging Sensor (LVIS) data was processed to produce high-resolution forest structure maps. We used multiple endmember spectral mixture analysis (MESMA) to map stressed and dead vegetation from the Airborne Visible Infrared Imaging Spectrometer (AVIRIS) data. LVIS and AVIRIS maps were fused to identify habitat hot-spots based on historical records of habitat preferences of the bird. Results indicate several small hotspots in the bottomland hardwood forests, but very few large and continuous patches qualify as potential woodpecker habitat. Results from this study are expected to aid search efforts for the woodpecker and also provide useful insights into lidar fusion for large scale habitat mapping.
Return to the top of the page

- Responsible NASA Official : J. Bryan Blair
- Web Curator: Albert Wu
- Privacy Policy & Important Notices
- Report a Problem
- Accessibility Statement
- Page Last Updated: 16-Mar-2018